Expected Values
Key Concepts
- Expectation and Linearity
- Moments (Mean, Variance, Skewness, Kurtosis)
- Conditional Expectations
- Joint Moments of Real-valued RVs
- Correlation, Orthogonality and Independence
- Moments of Real-valued Random Vectors
- Moments of Complex-valued Random Variables and Vectors
- Properties of (Auto)Correlation Matrices
- Correlation Matrices of Random Processes
Moments of random variables
The probability of extreme events
Independence and Correlation
Statistical independence does imply zero correlation. However, the reverse is not true.
Let X be a zero-mean, symmetric random variable, and define Y = X^2. Then:
\mathcal{E}\{X\} = 0, \qquad \mathcal{E}\{Y\} = \mathcal{E}\{X^2\} = \sigma_X^2, \qquad \mathcal{E}\{XY\} = \mathcal{E}\{X^3\} = 0
Hence, X and Y are uncorrelated because \mathrm{C}_{XY} = \mathcal{E}\{XY\} - \mathcal{E}\{X\}\mathcal{E}\{Y\} = 0,
They are clearly not independent, because knowing Y tells you the magnitude of X.
Correlation matrix of vectors
The (auto)correlation matrix of a random vector {\bf X} is given by {\bf R}_{\bf XX} = {\cal E}\left\{{\bf X}{\bf X}^T \right\}.
The centralized version is the (auto)covariance matrix with mean vector {\bf m_X} = {\cal E}\{{\bf X}\}: {\bf C}_{\bf XX} = {\cal E}\left\{({\bf X} - {\bf m_X})({\bf X} - {\bf m_X})^T \right\} = {\bf R}_{\bf XX} - {\bf m_X}{\bf m_X}^T,
The correlation coefficient matrix is obtained by normalizing the covariance matrix with respect to the marginal standard deviations: {\bf \rho}_{\bf XX} = {\bf D}_{\bf X}^{-1/2}\, {\bf C}_{\bf XX}\, {\bf D}_{\bf X}^{-1/2}, where {\bf D}_{\bf X} = \mathrm{diag}({\bf C}_{\bf XX}) contains the variances of the individual components.
Estimated Moments
In practice, the true expectations are unknown and must be estimated from data samples {\bf x}^{(1)}, {\bf x}^{(2)}, \dots, {\bf x}^{(M)}. The sample mean and sample covariance matrix are given by: \widehat{\bf m}_X = \frac{1}{M} \sum_{m=1}^M {\bf x}^{(m)}, \qquad \widehat{\bf C}_{\bf XX} = \frac{1}{M-1} \sum_{m=1}^M ({\bf x}^{(m)} - \widehat{\bf m}_X)({\bf x}^{(m)} - \widehat{\bf m}_X)^T.
From this, the sample normalized covariance matrix is \widehat{\bf \rho}_{\bf XX} = {\bf D}_{\widehat{\bf X}}^{-1/2}\, \widehat{\bf C}_{\bf XX}\, {\bf D}_{\widehat{\bf X}}^{-1/2}. where \widehat{\bf D}_{\bf X} = \mathrm{diag}(\widehat{\bf C}_{\bf XX}) contains the variances of the individual components.
Student Performance Data
We visualize the joint distribution and estimate the covariance matrix using data from a student exam performance dataset (Kaggle source).
Each data samples contain three values: \mathbf{x}^{(i)}= [‘Hours Studied’, ‘Attendance %’, ‘Exam Score’].
Student Performance Data - Covariance
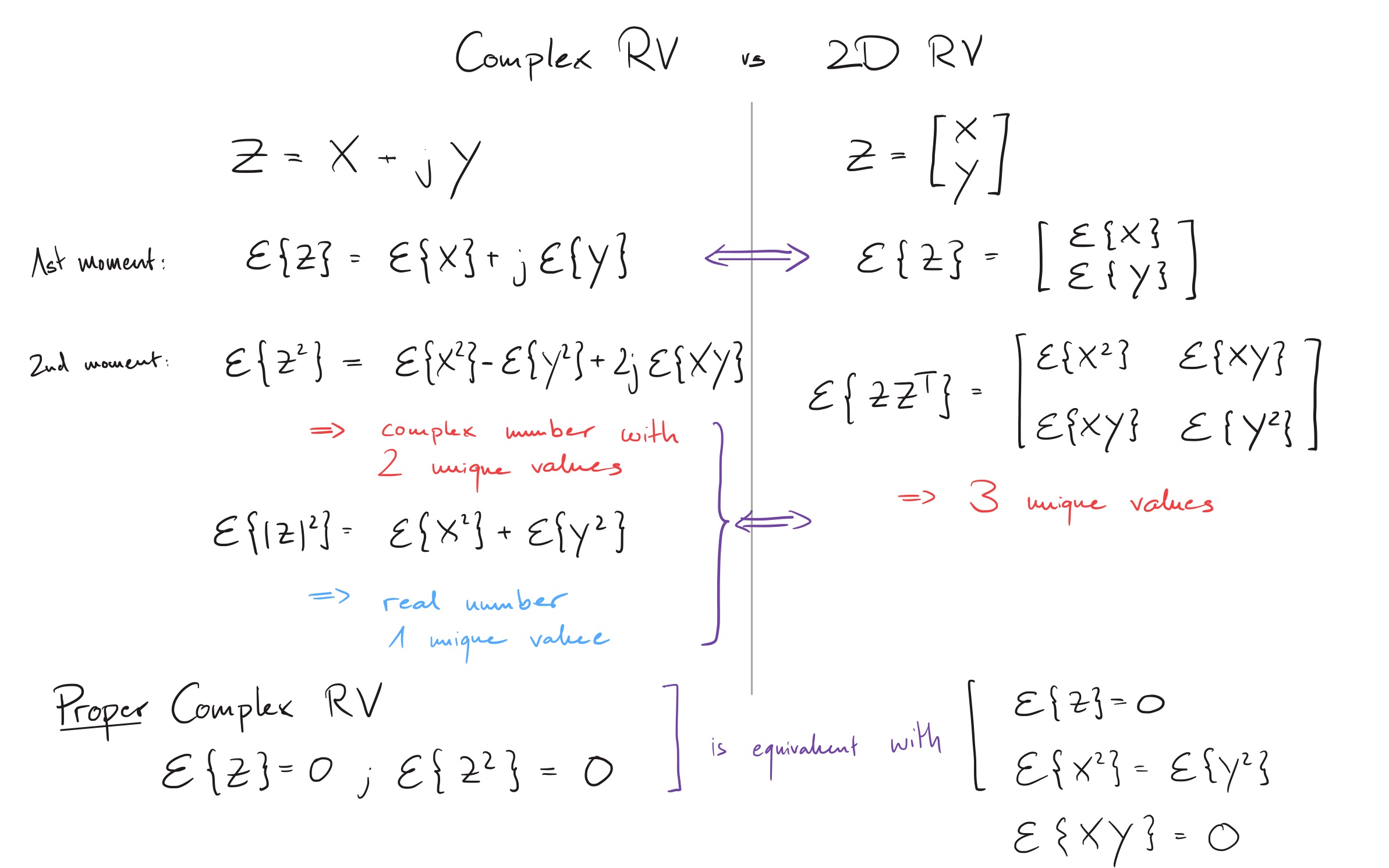
Moments of a complex-valued random variable
Complex random variables can be represented in two ways: Z(\eta) = X(\eta) + j Y(\eta) = R(\eta) \cdot \exp (j \Phi(\eta))
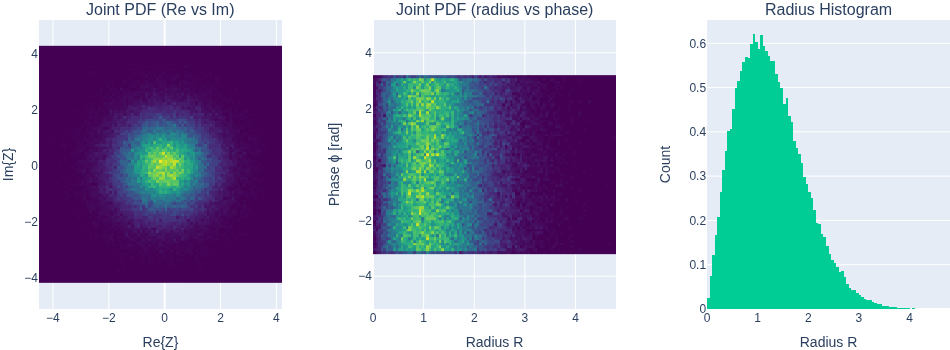
For a complex random variable with independent radius and phase, the moments are m_Z^{(n)} = \mathcal{E}[R^{n}] \mathcal{E}[e^{j\Phi n}] For a uniform phase \Phi \sim U[0,2\pi], all the moments are zero.
The absolute moment is however m_Z^{|n|} = \mathcal{E}\{|Z|^{n}\} = \mathcal{E}\{R^{n}\}
Complex Random Variables vs 2D Random Variables
Radially symmetric complex Gaussian
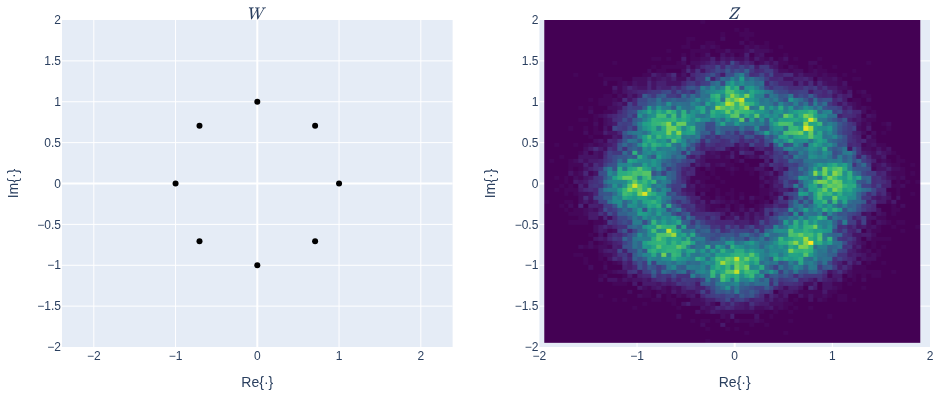
Phase-shift-keying (PSK) and additive noise
The phase shift key is modeled by Z = W + N, where W = \exp(jK) with K \sim U[0,1,\dots,M-1] and N as complex-valued noise, for example, Gaussian.
Application: Eigenfaces
A more advanced application of expected values are shown in the Eigenface Demo